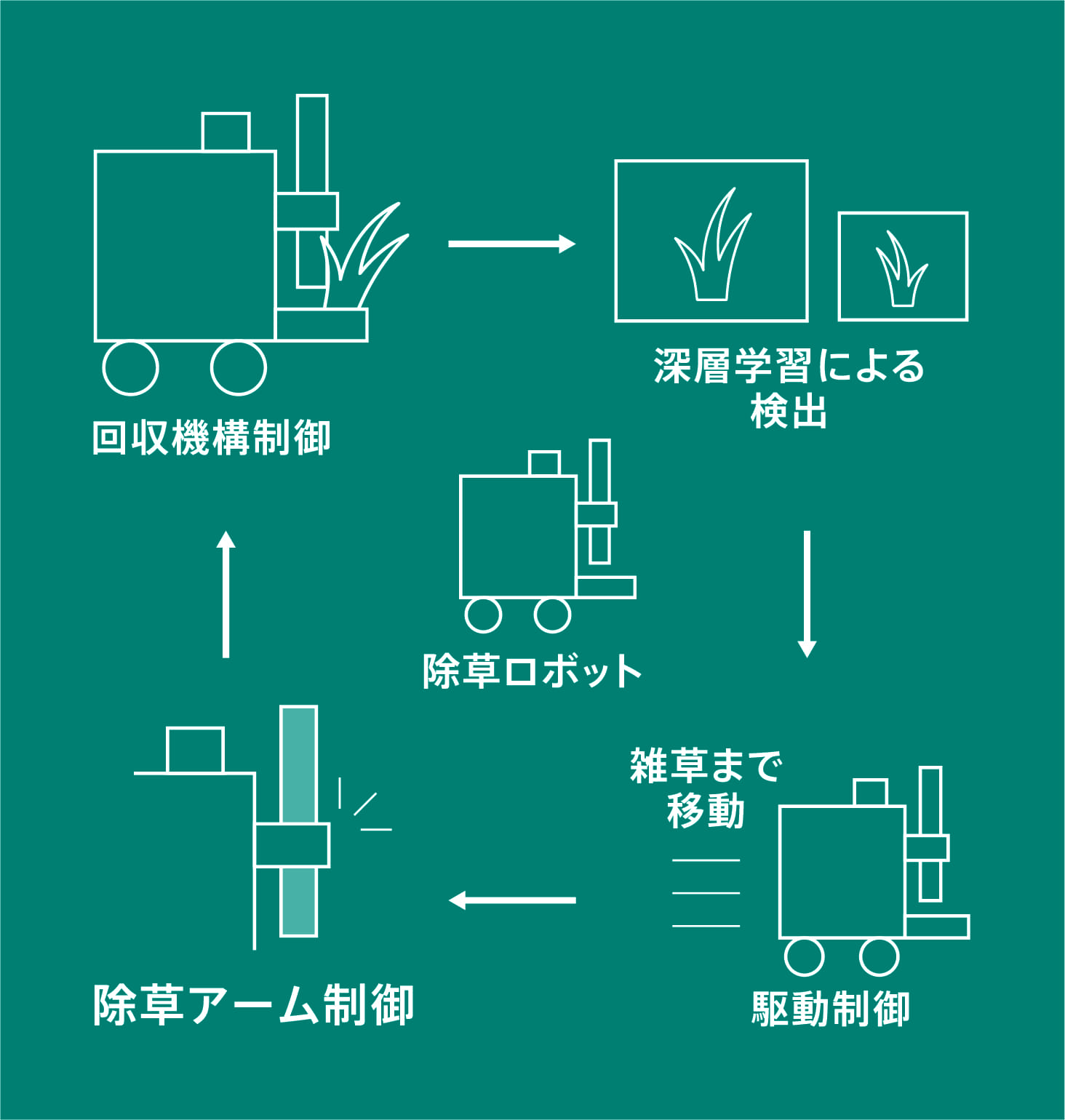
雑草の位置を認識し、 刈り取る手順は実現済み 自律走行して 除草を繰り返すロボットの開発を 産学連携で進めています
大学院 未来科学研究科
ロボット・メカトロニクス学専攻 2年
神奈川県/横浜市立東高校 出身
石川 竜之介 さん(左)
未来科学部
ロボット・メカトロニクス学科 4年
東京都/多摩大学附属聖ヶ丘高校 出身
柿本 隼希 さん(右)
研究テーマ 雑草を選択的に除草可能な 除草ロボットの開発
広い芝生や花畑などで人が雑草をすべて刈り取るのは一苦労です。ロボットの登場を待ち望む声に応えて、除草ロボットの研究に取り組んでいます。仕組みはシンプルで、ロボットが自走して、雑草を見つけて刈るというものです。これまでの研究で、雑草を認識し、雑草の位置まで移動して、刈り取るという手順は実現できています。次の段階として、除草性能を向上させるとともに、あらかじめ指定したエリア内を自律走行して、除草を繰り返すシステムにすることを考えています。この研究は、釜道研究室と中村研究室(知能機械システム研究室)でそれぞれの得意分野を統合するとともに、企業を含めた産学連携で進めてきました。2024年からは国土交通省関東地方整備局からの受託研究にも取り組んでいます。研究では、学んできたロボット設計やプログラミングの知識が生きます。また、AIや深層学習など最新の技術も組み込んで進めています。研究開発の現場で企業のプロのエンジニアの方たちと連携できることは、とても貴重な経験だと思っています。
 Dive
Dive
まずは飛び込んで体験してみる
興味のある分野、これまで経験したことのないことなど、まずは飛び込んでみたい。そこで得られる発見、経験が、いずれは自分の知となり身になると考えている。
ソフトメカニクス研究室とは
ソフトアクチュエータ/センサを応用し、柔軟で巧みな動作をするロボットを研究。また野菜収穫ロボットや自動除草ロボットなど農業分野で活躍するロボットの研究開発を産学連携で推進しています。
釜道 紀浩 教授