鉗子先端に実装したMEMS 6軸力センサにより得られたデータから肺ガンのサイズを算出する手法を開発
2017.01.23
鉗子先端に実装したMEMS 6軸力センサにより得られたデータから
肺ガンのサイズを算出する手法を開発
~術前CT画像と比較することで術中の腫瘍判別に応用~
1.発表者:
下山 勲(東京大学IRT研究機構 機構長,
東京大学大学院情報理工学系研究科知能機械情報学専攻 教授)
中井 亮仁(東京大学大学院情報理工学系研究科知能機械情報学専攻 特任助教)
土肥 健純(東京電機大学工学部機械工学科 教授)
桑名 健太(東京電機大学工学部機械工学科 助教)
齊藤 開(東京電機大学大学院工学研究科機械工学専攻 修士課程2年)
2.発表のポイント:
◆内視鏡手術用把持鉗子先端に取り付けたMEMS 6軸力センサの触覚情報を用いて、柔軟材料中に埋め込まれた硬質物質のサイズと位置を算出する手法の開発に成功しました。
◆把持周辺領域の硬質物質のサイズと位置から腫瘍の同定を試みる手法はこれまでになく、手術中に位置把握が困難な肺ガンの内視鏡下摘出手術への応用が期待されます。
◆肺ガン患者に対し、本手法で手術時間が短縮できれば術者・患者双方の負担を減らせるため、より安心・安全な医療の実現に繋がります。
3.発表概要:
低侵襲な内視鏡手術では、術者が患部に直接触れて触診することが難しいことから、手術前のCT(注1)スキャンによって腫瘍のサイズと位置情報を得ることが一般的に行なわれています。しかしながら、肺ガン摘出手術においては術前に肺内の空気を抜いて萎んだ状態にするため、CTスキャンで得られた腫瘍の位置情報のみから手術中の正確な位置を把握することは困難です。
東京大学大学院情報理工学系研究科の下山勲教授および中井亮仁特任助教らは、東京電機大学工学部の土肥健純教授および桑名健太助教らと協働し、先端把持部にMEMS(注2)6軸力センサを実装した内視鏡手術用把持鉗子(注3)を用いて、柔軟材料中に埋め込まれた硬質物質のサイズと把持位置に対する位置関係を算出する手法の開発に成功しました。本手法により算出した腫瘍サイズとCTスキャンで得られた腫瘍サイズとを比較すれば腫瘍の同定が可能になるため、手術中に術者が腫瘍の正確な位置を把握することが可能になると考えられます。
高齢社会の進展に伴い増加する肺ガン患者に対し、本手法を使うことで腫瘍を確実に同定することができれば、手術時間の短縮によって患者・術者双方の負担を減らせるため、より安心・安全な医療の実現が期待されます。
4.発表内容:
① 研究の背景・先行研究における問題点
開腹手術と比べて術後の回復期間が短いことから、近年、低侵襲な手法である内視鏡下手術に期待が集まっています。内視鏡下手術の場合、外科医は専用の手術器具を用いなければならないことから、自身の指先で患部を直接触ることができず、触診による腫瘍の検出や位置確認は困難となっています。そこで手術前にCTスキャンを行ない、画像情報から腫瘍のサイズと位置情報を得ることが一般的に行なわれています。しかしながら肺ガン摘出手術の場合、術前に肺の中の空気を抜き萎んだ状態で手術を行なうことから、CTスキャンで得られる膨らんだ状態での腫瘍の位置情報はあまり参考になりませんでした。そのため、手術中の萎んだ状態の肺に対して腫瘍の正確な位置情報を得ることが、現状の課題となっています。
これに対し、手術直前にCT画像を見ながら糸のついた金属針を腫瘍の近傍に刺入する方法(CTガイド下金属針留置)で腫瘍の位置把握が行なわれることもありますが、この方法には空気塞栓症という重篤な合併症を引き起こす可能性があることも報告されています。
手術用把持鉗子の先端把持部に多軸力センサを実装した研究もこれまでに幾つか報告されています。これらはロボット手術のための外科用鉗子や腹腔鏡下手術用把持鉗子などを対象としていましたが、いずれもセンサのサイズが大きく、センサ特性の実証程度に留まっていました。現在、鉗子先端の力センサについては可能な限りの小型化が常に求められている一方で、センサ付き把持鉗子のアプリケーションにまで踏み込んだ研究への期待が高まっています。
② 研究内容
本研究グループは、先端把持部にMEMS 6軸力センサを実装した内視鏡手術用把持鉗子を開発しました(図1)。MEMS 6軸力センサは、これまで東京大学下山研究室で培ってきたピエゾ抵抗型センサ(注4)技術を結集したもので、センサの心臓部とも言えるMEMSセンサチップのサイズは僅か1.25mm角と非常に小さくなっています(図2)。これをシリコーンゴムの内部に埋め込んだMEMS 6軸力センサは、センサ表面に垂直な圧縮力と、センサ表面と平行で互いに直交する向きの2軸のせん断力、さらに互いに直交する3軸周りのモーメントを計測することが可能です。シリコーンゴムのサイズは直径10mm、厚さ2mmと小さいうえに薄く、市販の内視鏡手術用把持鉗子の先端把持部に実装するのに問題無い大きさです。
開発したセンサ付き把持鉗子の有効性を示すために、シリコーン球を内部に埋め込んだゼラチンをセンサ付き鉗子で把持する実験を行ないました。シリコーン球とゼラチンは腫瘍と臓器を想定したもので、その硬さはそれぞれ肺ガンと肺臓を模擬しています。直径10mmのシリコーン球は15mm厚のゼラチンの厚さ方向中心、手前側端面から10mmの位置に埋め込みました。この模擬モデルに対して、開発したセンサ付き鉗子を用いてゼラチンを手前側から把持し、把持位置を-15mmから15mmの位置まで1mm刻みで動かしました(図3、シリコーン球の中心を0mmと設定)。二つの先端把持部の間隔は鉗子の軸に実装されたポテンショメータで計測し、この間隔が特定の値となるよう把持を行ないました。把持位置による3軸力と3軸トルクの値の変化を測定したところ、把持鉗子がシリコーン球に近付くに従って垂直力Fzが大きくなり、中心でピークとなることがわかりました。一方でモーメントMyもシリコーン球に近付くに従って大きくなりましたが、中心付近でゼロに近付き、中心を過ぎた後は値の正負が逆転することもわかりました。これらの結果から、シリコーン球近傍を把持した時のモーメントの出力によって、ゼラチンに埋め込まれたシリコーン球の方向を推測できることが示唆されると共に、垂直力Fzのデータを用いて埋め込まれたシリコーン球の直径を精度良く推測できることもわかりました。
③ 社会的意義・今後の予定など
本手法により算出した腫瘍サイズと術前のCTスキャンで得られた腫瘍サイズとを比較した時に、値がおおよそ一致すれば腫瘍の同定が可能になると考えられます。腫瘍の正確な位置情報を術者に対して提供することができれば、治療時間を短く抑えることができるため、患者・術者双方の負担を減らすことが可能になります。さらに、副作用の可能性のあるフックワイヤーや蛍光染色が不要になるため、より安心・安全な医療の実現が期待できます。
5.発表学会:
学会名:MEMS2017 (website: http://www.mems17.org/ )
発表テーマ:“MEMS 6-Axis Force-torque Sensor Attached to the Tip of Grasping Forceps for Identification of Tumor in Thoracoscopic Surgery”
発表者:Akihito Nakai*, Kenta Kuwana*, Kai Saito, Takeyoshi Dohi, Ami Kumagai, Isao Shimoyama
6.用語解説:
(注1)CT:
コンピュータ断層撮影(Computed Tomographyの略)。X線などを利用して物体を走査しコンピュータを用いて処理することで、物体の内部画像を構成する技術・装置。従来は物体を輪切りにした断面画像を得る技術であったが、画像処理技術の向上によって3次元グラフィックスとして表示されることが一般的となっている。
(注2)MEMS:
微小電気機械システム(Micro Electro Mechanical Systemsの略)。フォトリソグラフィや金属成膜技術、エッチング技術といった半導体加工技術を用いて、シリコン基板やガラス基板、有機材料等の上に機械要素部品や電子回路を作製し、センサやアクチュエータとしての機能を持たせたデバイス。
(注3)鉗子:
物を掴んだり抑えたり牽引したりするのに使用される手術器具。このうち、物を掴むものを把持鉗子と呼ぶ。
(注4)ピエゾ抵抗型センサ:
シリコン基板に不純物をドープすることで作製される、変形によって抵抗値変化を出力する素子。一般的な金属ひずみゲージに対し、50~100倍程度も高感度な素子を作ることができる。
7.添付資料:
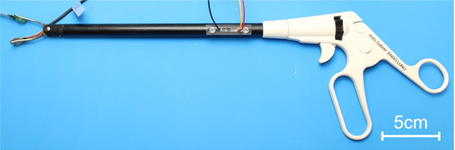 図1.先端把持部にMEMS 6軸力センサを実装した内視鏡手術用把持鉗子
図1.先端把持部にMEMS 6軸力センサを実装した内視鏡手術用把持鉗子
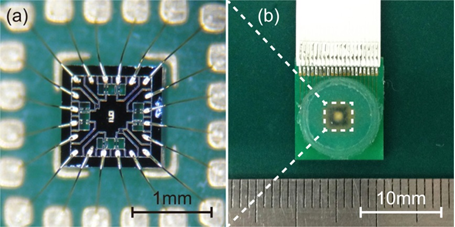 図2.(a) MEMSセンサチップ.(b) MEMS 6軸力センサ.
図2.(a) MEMSセンサチップ.(b) MEMS 6軸力センサ.
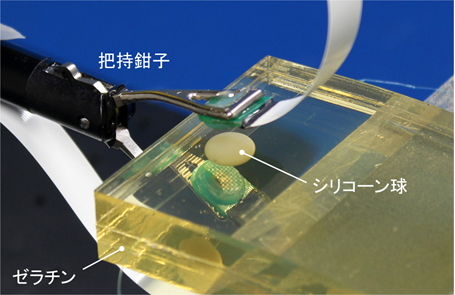 図3.シリコーン球を埋め込んだゼラチンサンプル
図3.シリコーン球を埋め込んだゼラチンサンプル
- 大学紹介
- 基本情報
- 学長挨拶
- 顧問学長対談
- 副学長・学部長等 役職者
- 建学の精神と教育・研究理念
- 東京電機大学大学院・大学の3つのポリシー
- 大学のあゆみ
- 大学の取り組み
- 情報公開
- 認証評価、自己点検・評価
- ホームカミングデー
- 東京電機大学が求める教員像
- 教育関係附置施設
- キャンパス紹介
- 東京電機大学大学のアセスメント・ポリシー
- 学園紹介
- 学校法人東京電機大学概要
- 理事長挨拶
- 理事・監事
- 評議員
- 事業・財務情報
- ガバナンス
- 学園創立100周年宣言
- 学園広報物
- TDUコメンテーター教員紹介
- 学校法人東京電機大学が求める事務・技術職員像
- 学園創立110周年記念事業
- 系列校・関連機関
- 寄附行為等
- 危機管理
- 新型コロナウイルス感染者状況
- 学校法人東京電機大学中期計画~TDU Vision2028~
- 学部
- システムデザイン工学部
- 未来科学部
- 工学部
- 工学部第二部
- 理工学部
- 教養教育センター
- 大学院
- 大学院での学び
- 先端科学技術研究科
- システムデザイン工学研究科
- 未来科学研究科
- 工学研究科
- 理工学研究科
- 入試・オープンキャンパス
- 大学入試
- 大学院入試
- 入学者選抜要項
- 入試結果
- オープンキャンパス2026
- オンライン個別相談会
- 進学相談会
- キャンパス見学会
- キャンパス自由見学
- キャンパス見学について
- メールマガジン
- 大学案内
- ざっくりまとめました! 東京電機大学の7つのこと
- 電大生の受験体験記
- 受験生向けSNS一覧
- 1分で電大が分かる!ショート動画
- 受験生への応援メッセージ
- キャリアプログラム
- 学内就職サイト
- 就職支援
- 資格取得・教員免許
- 公開講座
- 履修証明プログラム
- 実践知教育
- 留学・国際交流
- 本学へ留学希望の方
- 本学へ留学希望の方(最新TOPICS)
- 海外に留学希望の方
- 海外に留学希望の方(最新TOPICS)
- 海外留学動画(学内者専用)
- 国際センター
- TDU International Workshop (English)
- International Workshop
- スチューデントアンバサダー
- 国内でできる国際交流
- 在留期間更新許可申請
- 学生生活
- 学生要覧
- 履修の手引き
- 教職課程
- シラバス・時間割
- 年間予定
- 学習サポートセンター
- 学生アドバイザー
- 障害のある学生への支援
- その他授業関係
- 学費
- 奨学金
- 教育ローン・短期貸与金制度
- 保険制度・経費補助
- 証明書発行・事務窓口
- 学生相談室・健康相談室
- 休学・退学などについて
- クラブ・サークル活動
- 学生食堂と売店
- 車両通学
- ⾼等教育の修学支援新制度(授業料等減免・給付型奨学金の支援)について
- 東京電機大学後援会
- 教育訓練給付制度