学園祭で進路の悩みを親身に受け止めてくれた在学生がいたり、祖父の出身大学だったことなど、縁を感じて志望しました。
[探究のきっかけ] 興味がある制御を軸に基本4分野を総合的に学ぶ
制御の分野に興味があって入学。メカトロニクスの基本となる機械、電気・電子、情報、制御の4分野を総合的に学べるので、まんべんなく授業を履修して基礎力をつけました。3年次の「コンピュータビジョンとAI」の授業をきっかけに深層学習に関心を持ち、画像処理を専門に扱う研究室を選びました。
 3年前期の時間割。金曜2限にあった「コンピュータビジョンとAI」がきっかけで今の研究室へ
3年前期の時間割。金曜2限にあった「コンピュータビジョンとAI」がきっかけで今の研究室へ
[ものづくりの感動] 学んだ知識を集大成したロボット製作が自信に
3年次の「メカトロニクス総合実験B」の授業では、自動でエアホッケーの対戦ができるロボットを製作。軌道予測のプログラム作成から電子回路のハンダ付けまで、チームで協力してイチからつくり上げました。それまでに学んだ4分野の知識をフル活用して完成させた機体が、実際に動いて勝利した時は感動しました。
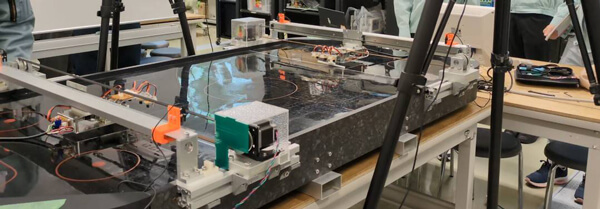 「メカトロニクス総合実験B」で作成したホッケーロボット同士で対戦している風景手前が自チーム
「メカトロニクス総合実験B」で作成したホッケーロボット同士で対戦している風景手前が自チーム
[さらなるチャレンジ] 大学院に進んで国際学会で発表したい
現在は、AIによる画像処理技術を応用し、低解像の画像から高解像の画像を生成する「超解像モデル」について研究。関連する英語の論文を精読し、自らの実験成果を技術論文としてまとめる過程では、研究者の卵としての成長を感じています。今後、研究をさらに深化させ、国際学会の舞台で発表することが目標です。
 研究に使用するコードエディタとデータセット
研究に使用するコードエディタとデータセット
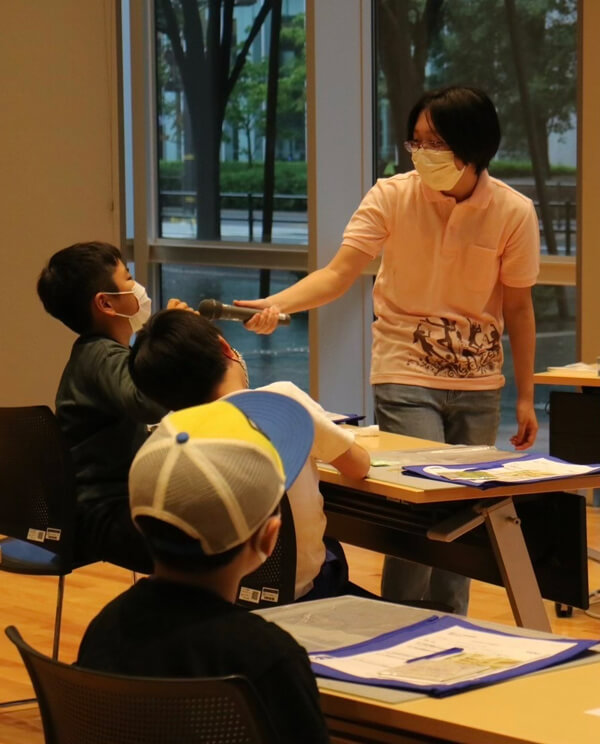
実験教室のアルバイトで子どもとふれあう
大学では「電大ガールズ」というサークルに所属。小学生を対象にした実験教室で講師を務めました。学部を超えた友人たちと知り合えて、楽しい時間を過ごせました。

関連コンテンツ
その他のコンテンツ
- 大学紹介
- 基本情報
- 学長挨拶
- 顧問学長対談
- 副学長・学部長等 役職者
- 建学の精神と教育・研究理念
- 東京電機大学大学院・大学の3つのポリシー
- 大学のあゆみ
- 大学の取り組み
- 情報公開
- 認証評価、自己点検・評価
- ホームカミングデー
- 東京電機大学が求める教員像
- 教育関係附置施設
- キャンパス紹介
- 東京電機大学大学のアセスメント・ポリシー
- 学園紹介
- 学校法人東京電機大学概要
- 理事長挨拶
- 理事・監事
- 評議員
- 事業・財務情報
- ガバナンス
- 学園創立100周年宣言
- 学園広報物
- TDUコメンテーター教員紹介
- 学校法人東京電機大学が求める事務・技術職員像
- 学園創立110周年記念事業
- 系列校・関連機関
- 寄附行為等
- 危機管理
- 新型コロナウイルス感染者状況
- 学校法人東京電機大学中期計画~TDU Vision2028~
- 学部
- システムデザイン工学部
- 未来科学部
- 工学部
- 工学部第二部
- 理工学部
- 教養教育センター
- 大学院
- 大学院での学び
- 先端科学技術研究科
- システムデザイン工学研究科
- 未来科学研究科
- 工学研究科
- 理工学研究科
- 入試・オープンキャンパス
- 大学入試
- 大学院入試
- 入学者選抜要項
- 入試結果
- オープンキャンパス2026
- オンライン個別相談会
- 進学相談会
- キャンパス見学会
- キャンパス自由見学
- キャンパス見学について
- メールマガジン
- 大学案内
- ざっくりまとめました! 東京電機大学の7つのこと
- 電大生の受験体験記
- 受験生向けSNS一覧
- 1分で電大が分かる!ショート動画
- 受験生への応援メッセージ
- キャリアプログラム
- 学内就職サイト
- 就職支援
- 資格取得・教員免許
- 公開講座
- 履修証明プログラム
- 実践知教育
- 留学・国際交流
- 本学へ留学希望の方
- 本学へ留学希望の方(最新TOPICS)
- 海外に留学希望の方
- 海外に留学希望の方(最新TOPICS)
- 海外留学動画(学内者専用)
- 国際センター
- TDU International Workshop (English)
- International Workshop
- スチューデントアンバサダー
- 国内でできる国際交流
- 在留期間更新許可申請
- 学生生活
- 学生要覧
- 履修の手引き
- 教職課程
- シラバス・時間割
- 年間予定
- 学習サポートセンター
- 学生アドバイザー
- 障害のある学生への支援
- その他授業関係
- 学費
- 奨学金
- 教育ローン・短期貸与金制度
- 保険制度・経費補助
- 証明書発行・事務窓口
- 学生相談室・健康相談室
- 休学・退学などについて
- クラブ・サークル活動
- 学生食堂と売店
- 車両通学
- ⾼等教育の修学支援新制度(授業料等減免・給付型奨学金の支援)について
- 東京電機大学後援会
- 教育訓練給付制度